| mpro: MagellanPro networked control and simulation |
Kris Beevers
(beevek@gmail.com)
Rensselaer Polytechnic Institute Algorithmic Robotics Laboratory |
Download mpro
mpro is provided in source code form only. For instructions on
compiling and installing the programs and library, read the
INSTALL file that is included in the distribution. For
instruction on using mpro, read the README file or this
website.
Current version: 0.1.8 (4/8/2006)
- TGZ: mpro-0.1.8.tar.gz
- ZIP: mpro-0.1.8.zip
NOTE: If you need help with mpro, you can email me. However, I do not guarantee any kind of response, as I am usually too busy playing with robots.
NOTE 2: If you find bugs in mpro, please let me know. Ideally, please send me code to fix the bugs! Do the same if you add features.
Overview
The iRobot MagellanPro is a research robot with a differential drive system, 16 bump sensors, 16 infrared range sensors, and 16 sonar range sensors. (iRobot no longer builds or supports these robots.) The mpro package provides support for writing software to control a MagellanPro and can be used on both *nix based and Windows based systems. It includes the following:
- mprosim: A simulator. Any program you write with the mpro client library can be run with both the simulator and a real robot. Since mpro is network based, you can run the simulator on a different computer than your client program if you wish. The simulator takes a number of command line arguments to specify worlds, robot properties, and so on. (Alternatively, these can be specified in a configuration file. To get a default configuration file, run mprosim --save-config default.conf.) Simulated "worlds" are represented with simple PGM (image) files where dark pixels are "occupied" and light pixels are "unoccupied." The simulation runs at a reasonably high frequency and reasonably simulates odometry, IR, and sonar noise. Note that the simulator does not display any graphical output, so it can be run in the background.
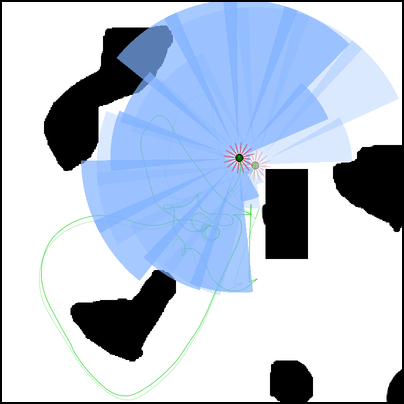
- mprogui: A simple GUI for the simulator or Magellan. By default, the GUI connects to "localhost" (i.e., it assumes there is a simulator running on the same computer). You can specify a different location with "mprogui -h hostname". For example, to display the state of the real robot (at RPI), use "mprogui -h magellanpro.robotics.cs.rpi.edu". If the GUI is showing a simulated robot, it also displays the simulated world in which the robot is situated. The displayed configuration of the robot is that reported by its (noisy) odometry, but the true configuration of the robot is also displayed (as a "semi-transparent" robot). The GUI supports a number of keyboard commands: press 'h' in the GUI to list the commands on the console. You can also use the mouse to pan (left button pressed) or zoom (right button pressed) in the GUI.
- mproremote: A simple remote control program. It displays a box containing "crosshairs". The horizontal axis controls the robot's rotational velocity, and the vertical axis controls its translational velocity. To move the robot, click (with the left mouse button) on the origin of the axes, and then drag the mouse (up to move forward, down backward, left to turn left, right to turn right). When the mouse is released, the robot stops. By default, mproremote connects to "localhost" but you can connect to, e.g., the real robot with "mproremote -h magellanpro.robotics.cs.rpi.edu".
- mproshutdown: A remote shutdown command. This has no effect on a simulator. Instead, it shuts down the computer on the real robot. Only use this when you are done working on the robot. Just run "mproshutdown" (it connects to RPI's Magellan by default).
- libmproclient: You can write programs that control a simulated or real robot by including "mproclient.h" and linking against the mproclient library. In general you will probably find it useful to accept a command line option specifying the host to connect to, so that the same program can be run in simulation or on the real robot without recompiling.
- mprod: A server daemon that runs on a MagellanPro robot. The server listens for connections from libmproclient based clients and then controls the robot or transfers data according to client commands. The server is built on top of a version of the MAGE library for on-robot control of the MagellanPro. MAGE was developed by Nathaniel Fairfield at Swarthmore. We have modified MAGE slightly to improve its infrared sensor model. The modified version, Mage-0.31, is available from Nathaniel Fairfield's site or from here.
Example session
Following is an example session showing a series of commands that you can try in order to familiarize yourself with mpro. This assumes you are using a Unix-based operating system (the '&' signs run programs in the background). In Windows you may need to use a separate command shell for each program. It also assumes the programs have been installed somewhere in your path.
# run the simulator in the background with the test map (provided in # the distribution in the data directory). mprosim --map data/test.pgm --pixels-per-meter 40 & # run the gui, which connects to your computer by default mprogui & # run the remote control program mproremote # now drive the robot around a bit, then press 'q' to quit # compile the example programs and then run move-until-ir, which # connects to localhost by default cd examples make ./move-until-ir # quit the GUI by pressing 'q', and terminate the simulator with: killall mprosim # now let's try the same thing on a real robot mprogui -h magellanpro.robotics.cs.rpi.edu & mproremote # when you get bored, do: ./move-until-ir magellanpro.robotics.cs.rpi.edu # now write your own programs!